
A short post about some experiments conducted to test the spurious speed claims on a cheap remote-controlled car purchased from eBay. (AAA batteries not included).
As you can see, the car claims to achieve the “high speed” of 25km/h. To be fair, as it’s classed as being 1:20 scale, then 25km/h (15.5mph) would be 500km/h (310mph) in real life.
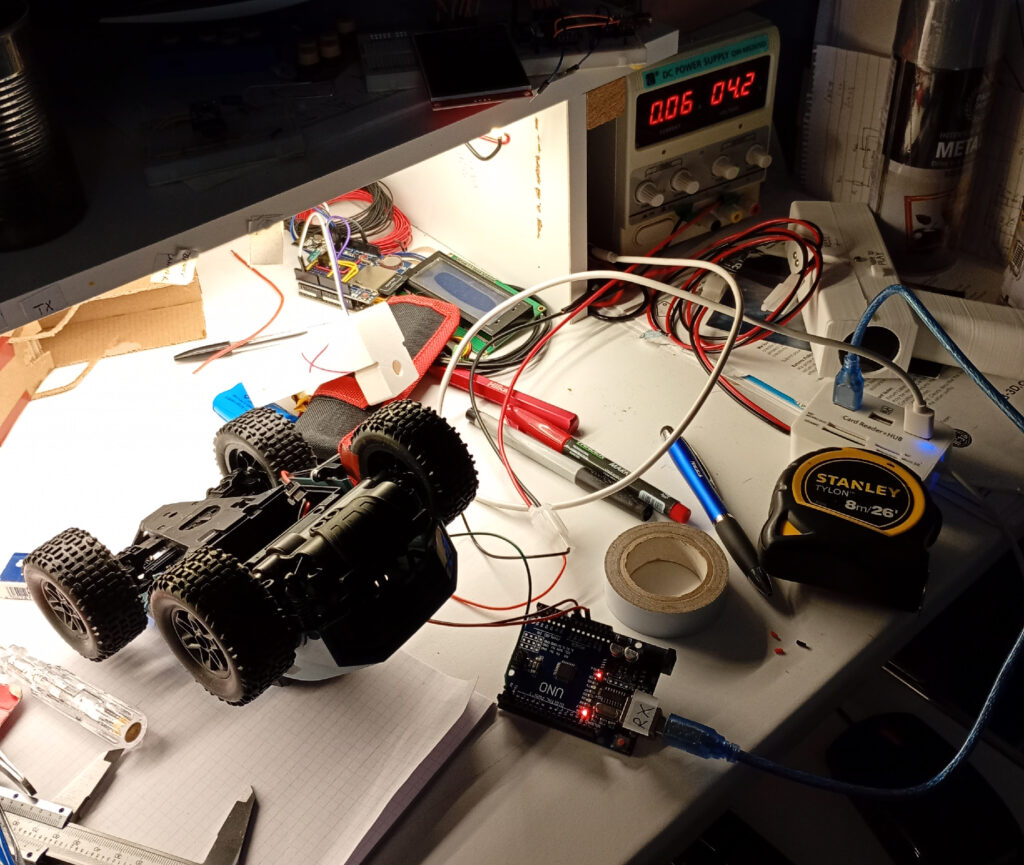
So to conduct the test, an Arduino Uno and beam-break sensor were used to count the number of rotations in a given timeframe. A small amount of electrical tape was adhered to the wall of the tyre with a tag coming out to act as the sensor trigger.
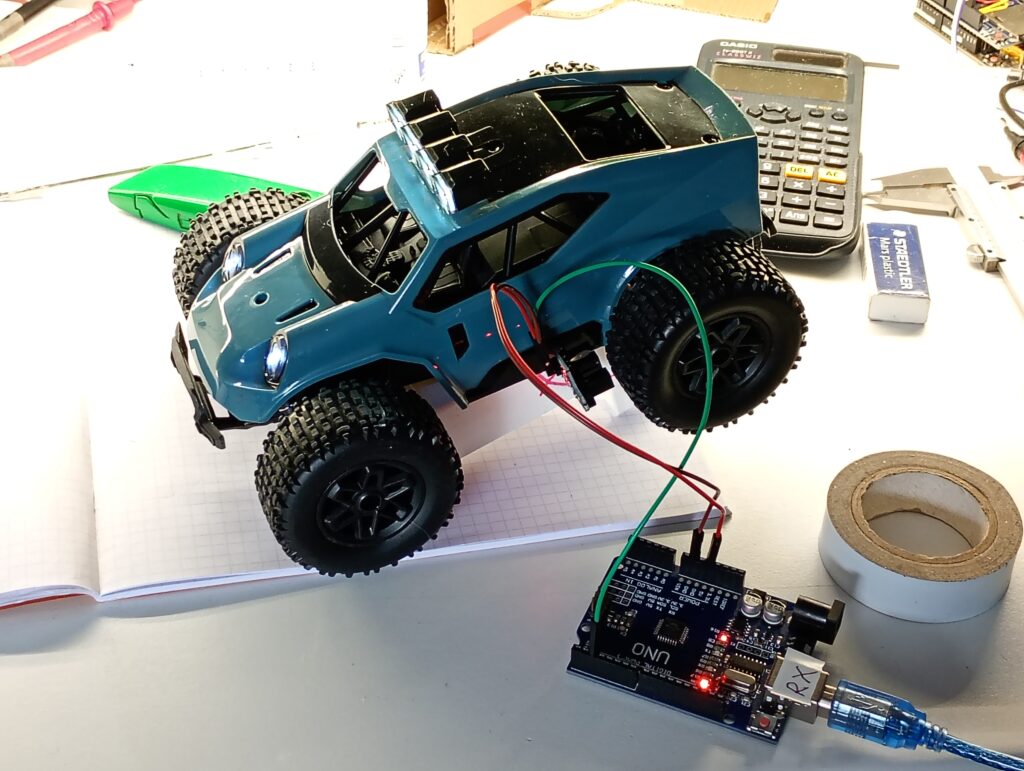
With no load on the rear wheels and a fairly well charged battery (measured at 4.02V), the maximum frequency was 25 rotations per second. Given that the diameter of the wheel is 62mm, this gives a speed of 4,869mm/s, which equates to 17.5km/h (10.9mph) – only 70% of the claimed top speed! For shame pedestrianmall1.
The car utilises brushed DC motors for the drive and steering, that means the motor speed is dependant on the voltage, so I couldn’t help but see how far it would be possible to push the electronics, and if it’s possible to attain the mythical 25km/h speed stated.
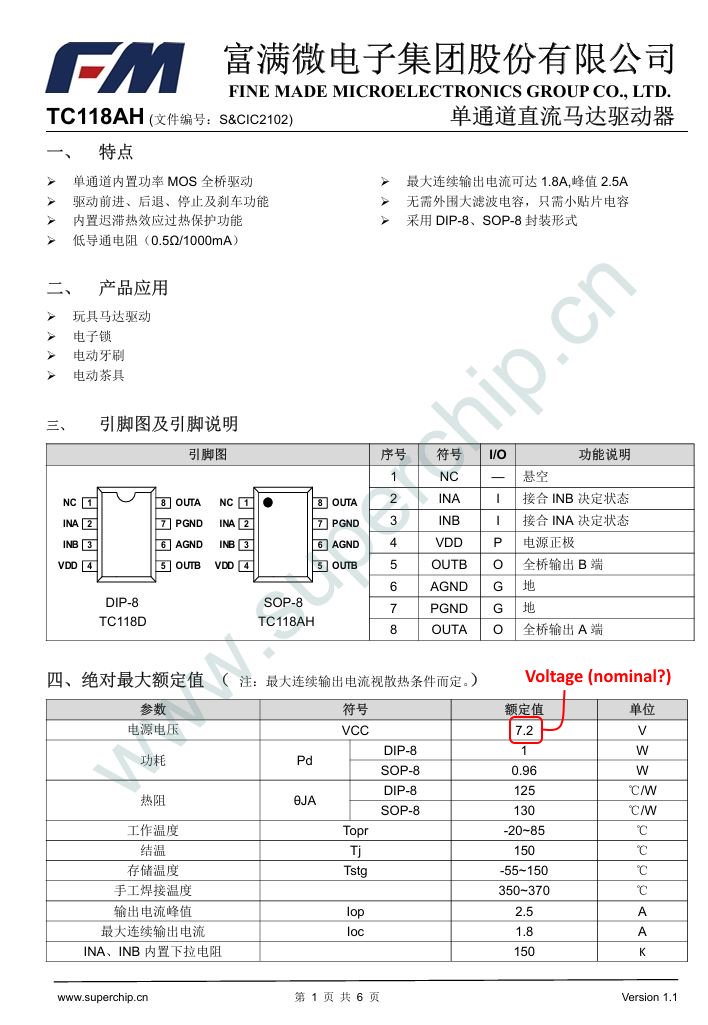
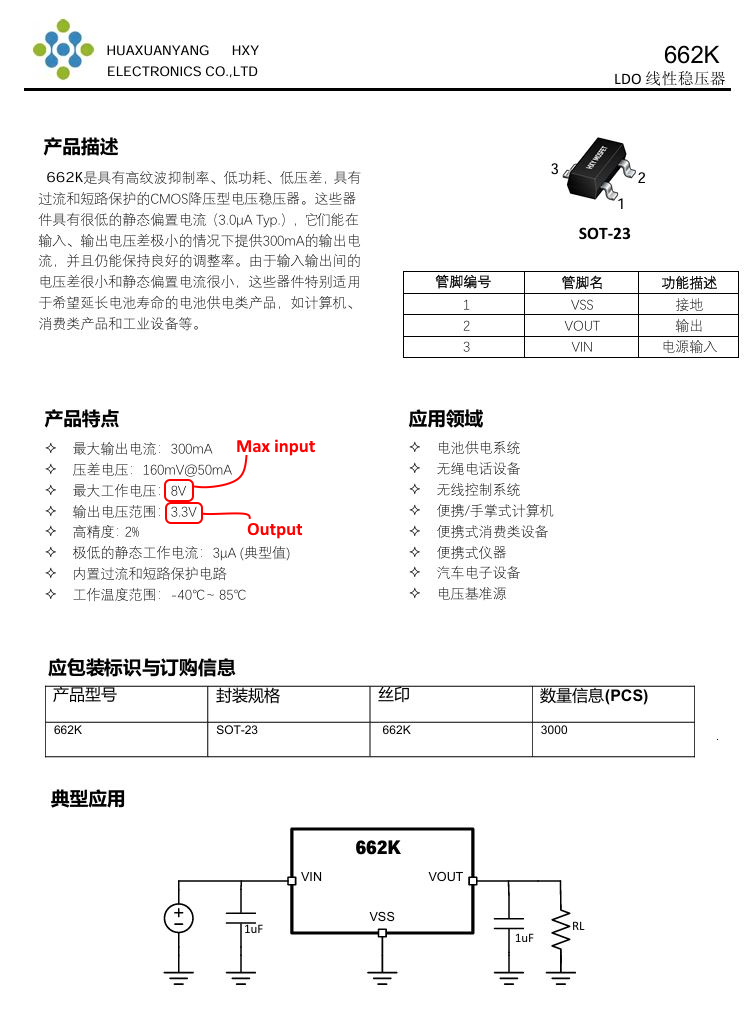
After opening up the car, it was possible to see that the motor drivers are TC1118AH, and the voltage regulator for the main ‘CPU’ is a 662K. The datasheets for these are below – I hope you can read Chinese. There were no markings on the ‘CPU’, and no additional hardware for the radio communications (aside from a 24.000MHz crystal and a short wire antenna).
The test procedure was fairly basic: hook up the battery connector of the car to the bench power supply and test the wheel speed at various voltages. Simples.
The code used for this test was equally simple: tie the sensor to an interrupt to detect a falling edge and count the pulses, then every second print the count to the serial monitor and reset the counter.
The results were recorded across a range of voltages from a minimum of 4.2V (equivalent to a fully charged Li-Ion battery), all the way to a maximum of 7.2V which is noted on the motor driver datasheet above.
Below is the table of findings and a graph to show the results from the experiment. Above 5V it was found that there would be a brief peak in speed before settling down to a more constant(ish) speed.
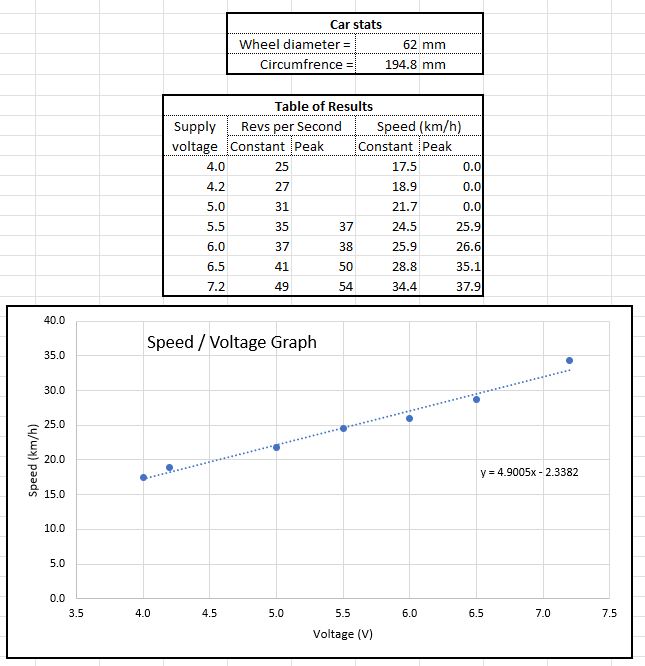
From this we can see that the relationship between speed and voltage is linear for this voltage range, and using the equation we determine that the speed claims of the car are true when the input voltage is at 5.57V (and there is no load).
The highest speed recorded was a short pulse at 7.2V that registered 54 rotations of the wheel, thus giving a top speed of 37.9km/h (23.5mph). Scaling this up to full size yields a terrifying velocity of 758km/h (471mph).
To finish, I taped a 2S Li-Ion battery to the roof of the car and plugged it in. Bit daring as the voltage measured about 8V – but the car was great fun to drive around with all of the added power, on certain floor surfaces the car would even pop a wheelie! However, the innards did get a bit toasty to the point where the steering would crap out if held on for too long…
