
I’ve previously tested beam divergence of the Benewake TF-Luna as part of the VL6180X distance sensor write-up, which also includes results from the Sharp IR distance sensor. This post refines on the testing proceedure and builds on these tests with the Garmin LiDAR-Lite V3HP.
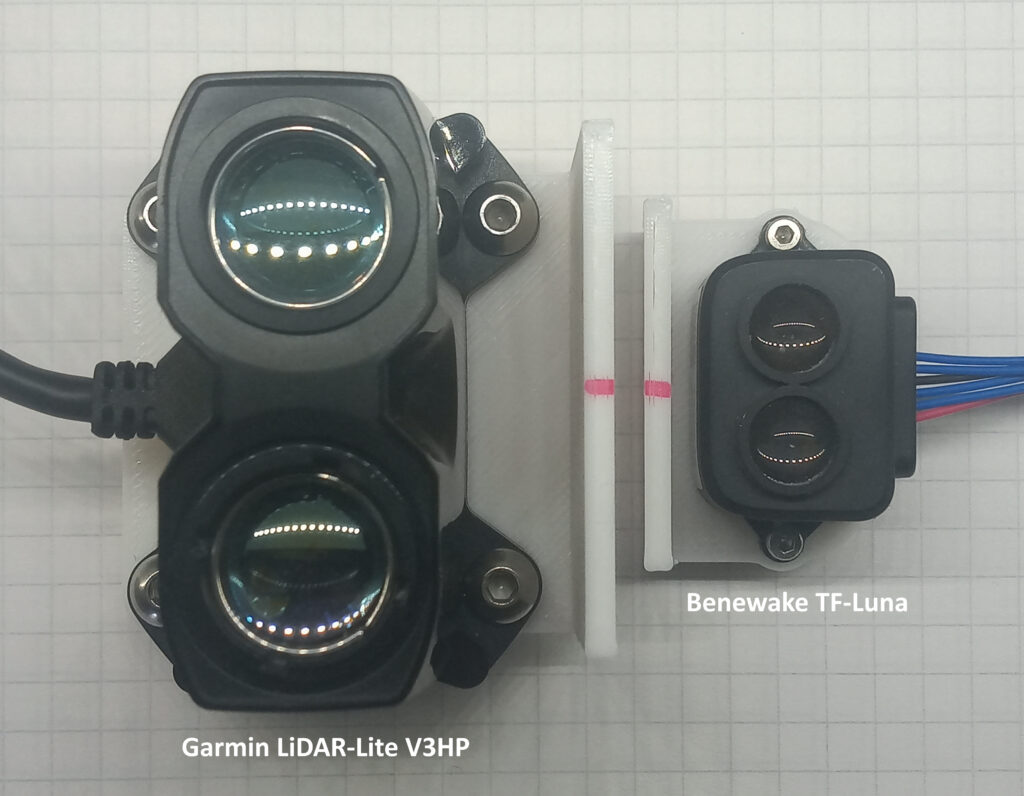
According to the datasheets, the Benewake TF-Luna has a 2 degree beam divergence; whereas the Garmin LiDAR-Lite V3HP has a 8 milli-radian beam divergence (approx 0.5 degree).
Test Method
The test method simply involved pulling an object of known width across the beam path at set intervals; recording the sensor data at each interval.
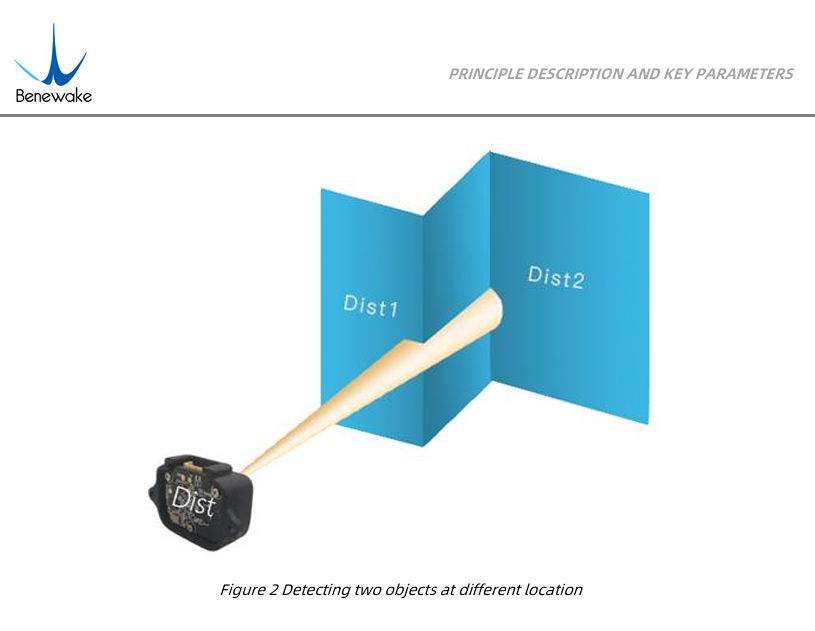
The purpose of the test is to instigate an ‘edge’ case scenario as denoted by figure two on the Benewake datasheet:
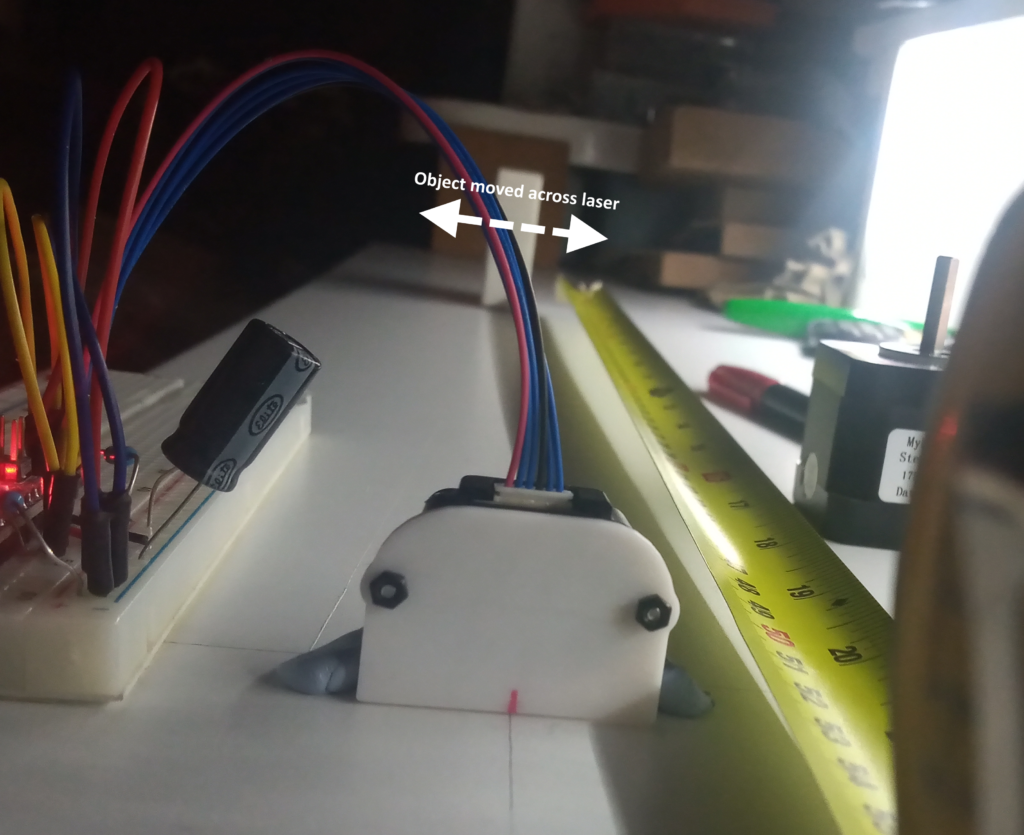
Each sensor was mounted to an ‘L’ shape bracket that could be secured in place with during the test.
A subtle error was made at this point as the modules report measurements from the sensor at the rear, not the lens at the front.
Initially a white cardboard box that was 22mm wide was used for the target. However, this wobbled and was difficult to align with any accuracy.
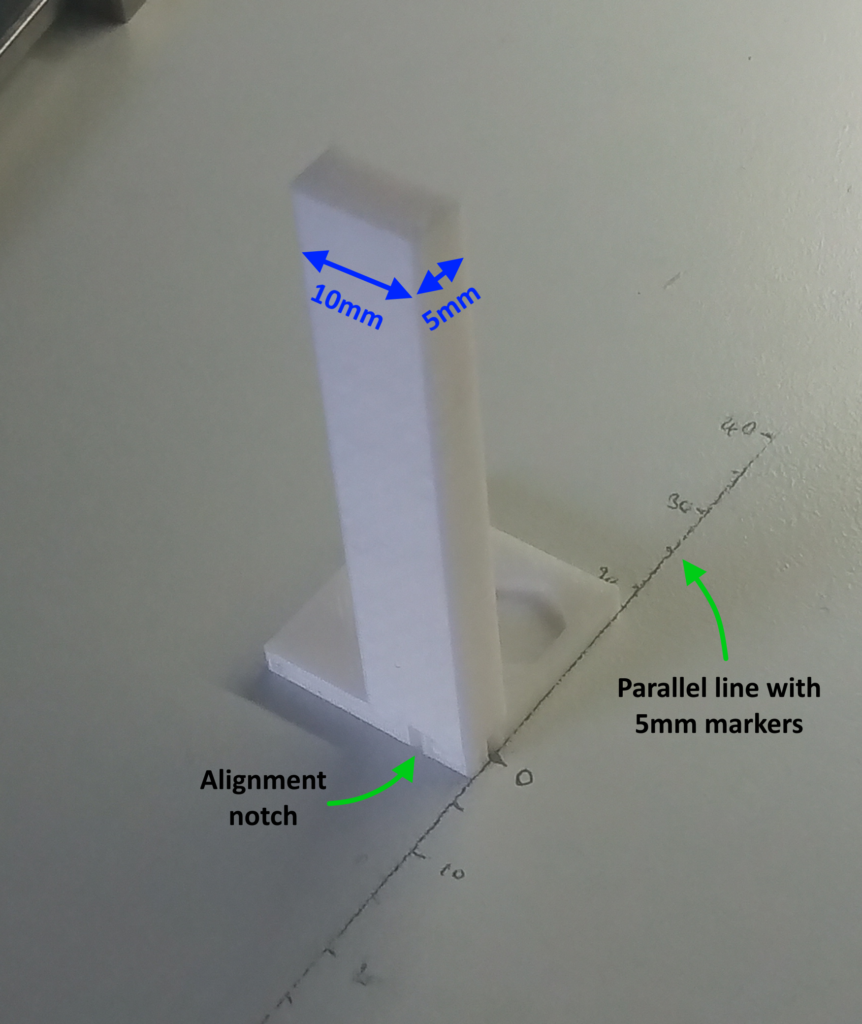
To improve this, a 3D printed jig was produced to provide a 10mm wide target on one face and a 5mm wide target on the other face. The jig also included alignment markers for more accurate positioning.
At the test distance of nominal 500mm, a beam divergence of 0.5 degrees would create 5mm wide beam. At a 2 degree divergence, the beam would be approximately 17.5mm wide!
Results
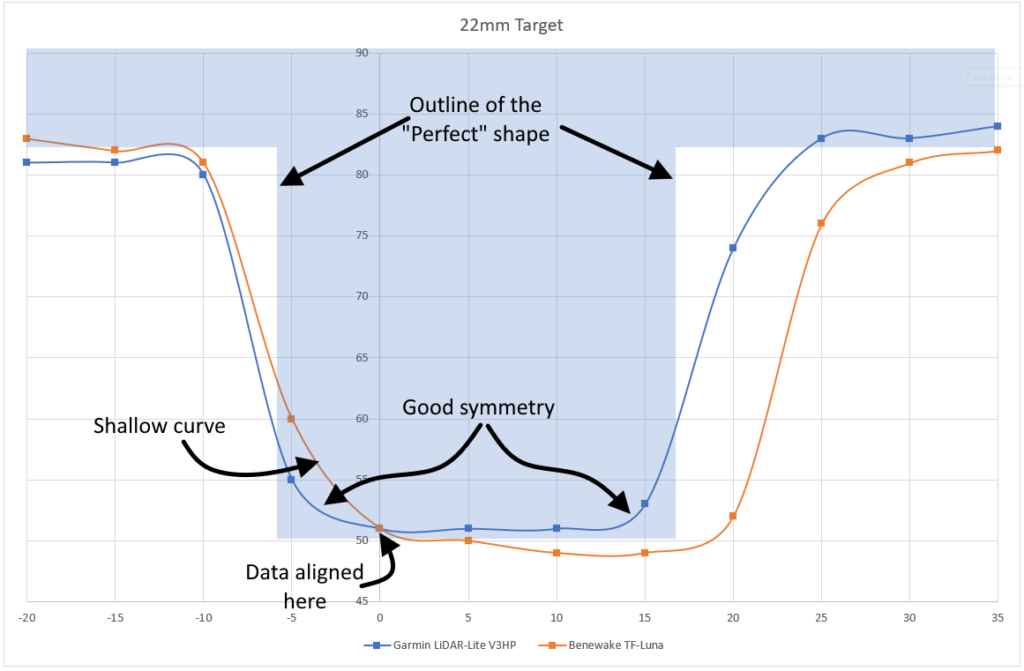
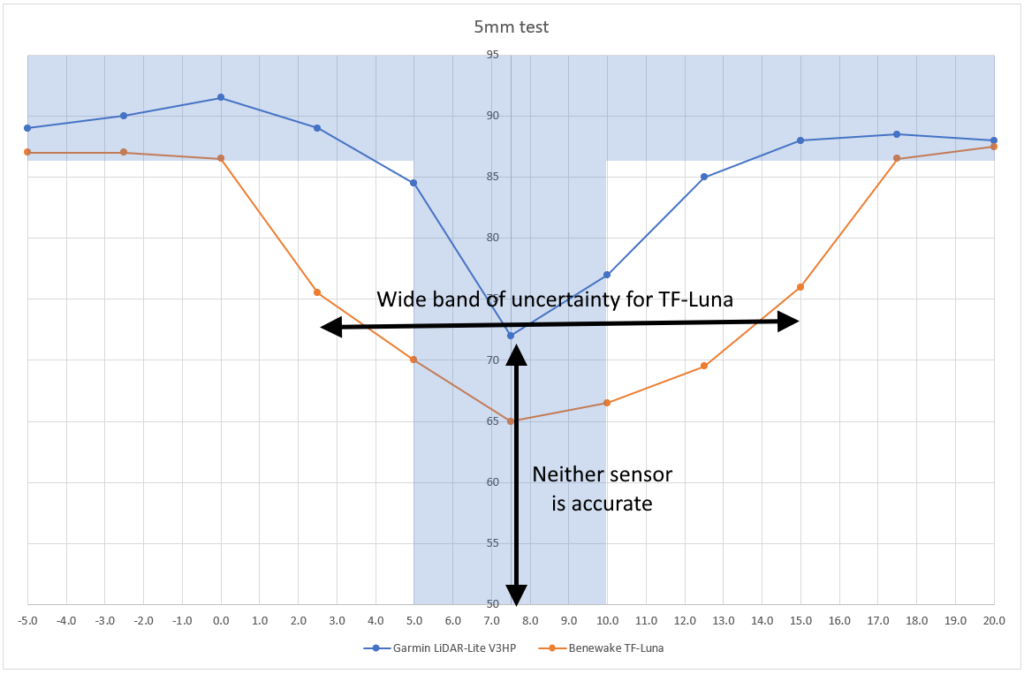
The results for the 22mm, 10mm and 5mm tests are displayed in the graphs below. Datapoints are given as a 10-shot average. For the 22mm target, the measurements were done at 5mm intervals for a single pass. The 10mm and 5mm targets were done at 2.5mm intervals over two passes (left to right, then right to left).
In all the graphs; the ‘perfect’ shape is shown in blue if the sensor has 100% accuracy and no beam divergence.
It is worth noting that
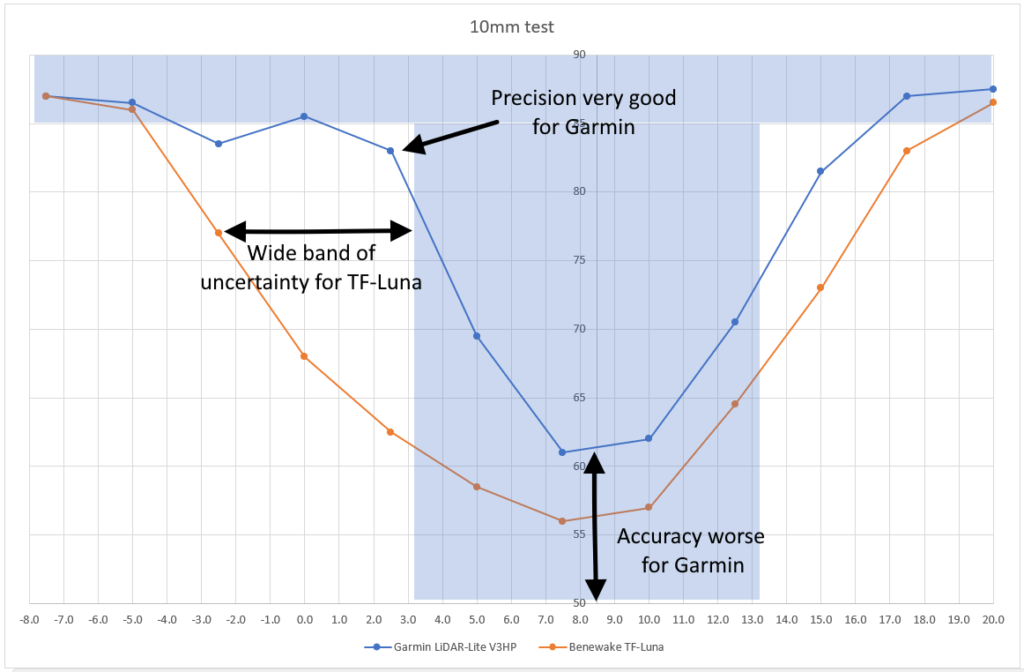
The decrease in the accuracy for the Garmin sensor is explained on page 9 of their datasheet: “When the
beam overfills (is larger than) the target, the signal returned decreases by 1/C^4 or the fourth root of the target’s cross section.”
These tests show that Garmin is more precise, but not necessarily as accurate as the Benewake.
Ultimately, these tests are very basic and limited by the confined area. The also tests don’t cover situations of objects passing from top to bottom; nor the effects of different surfaces.