What?!
Building on the lessons learned when making the original LiDAR scanner while adding new features such as:
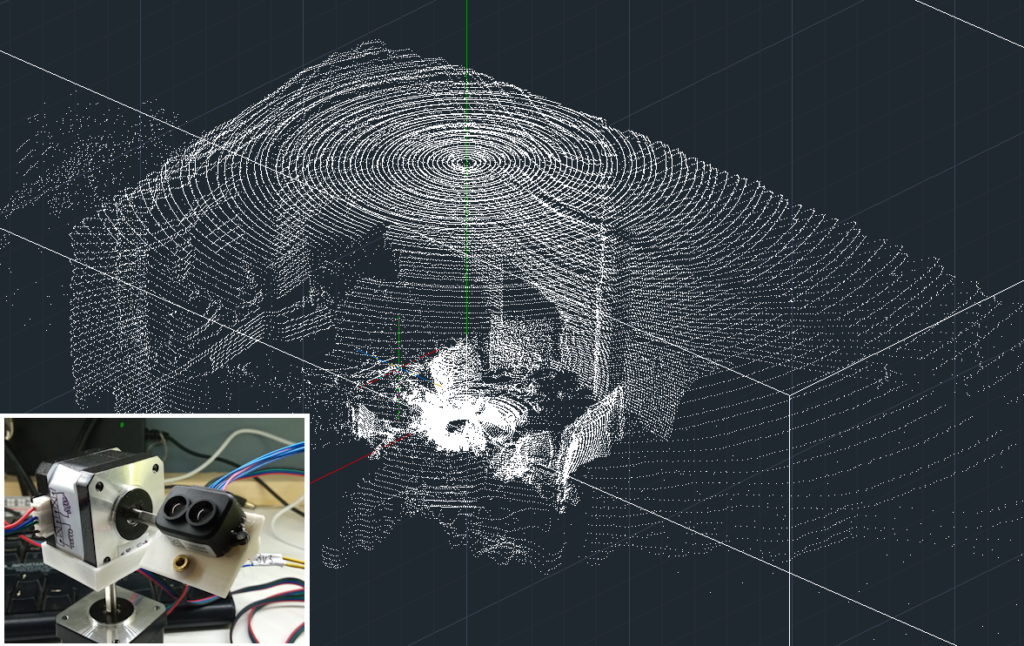
- The ability to stitch multiple scans together.
- A graphical user interface.
- Auto-levelling.
- Faster and more accurate scans.
Why?!
Being able to produce fast and accurate scans would be ideal for 3D modelling larger areas such as rooms and buildings.
How (Much)?!
Mechanically, a full rotating turret with 360 degree rotation is needed. Movement will be supplied by a pair of NEMA17 steppers coupled to either a A4988 or DRV8825 drivers.
Power for the unit would ideally be from a battery to provide portability; however the current draw from the motors may dictate otherwise.
The turret head would contain the TF Luna LiDAR sensor for measurements, red laser diode to interact with the user and an MPU6050 accelerometer & gyroscope.
An ESP32 would be the brains of the operation, able to carry out more accurate and precise calculations while storing all of the data to an SD card.
The menu system would be displayed on a 20×4 I2C LCD and controlled via a 5-key switchpad. However, the ILI9341 provides a higher resolution colour display and touch screen capabilities.
With regard to cost; financial costs are negligible as the hardware is in stock. The greatest cost will be time.
When?!
I’ve managed to shoe-horn this project to fit the criteria for my HNC Engineering project. So I’m currently working on this at the moment! Planned completion is May 2025!
Where?!
It would be a dream come true to whip this out during a site visit at work and set it off to scan a warehouse in minutes.
To make this dream come true I would need to sit at the computer for a long time.
Feedback
Do you think this project idea is worth pursuing? Do you think this acorn of an idea could grow in to a mighty oak tree; or is it destined to become squirrel poop? Cast your vote below! Also feel free to leave any comments at the bottom of the page.